
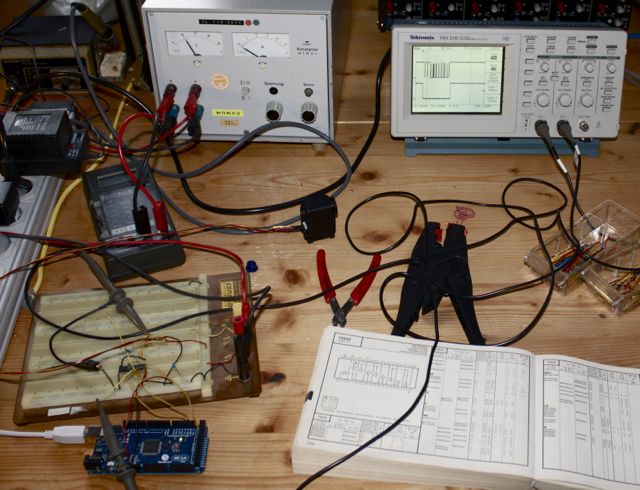
 Finally I got the code fixed that talks to the servos. The first AX-12A is moving. The scope screen shows the serial communication on the servo bus. Now I am expanding the functions to be able to talk with the three servos of the test foot. At the moment two AX-12A and one MX-28.
Finally I got the code fixed that talks to the servos. The first AX-12A is moving. The scope screen shows the serial communication on the servo bus. Now I am expanding the functions to be able to talk with the three servos of the test foot. At the moment two AX-12A and one MX-28.
This servo configuration might change in the future, a parcel with more servos is on it’s way.