

I always wanted to build a walking robot. A few years ago i did experiment with artificial muscles driven by pressurized air. This is an interesting approach, but making and controlling the air flow requires big and heavy equipmet. That time I also had not the necessary tools to build the mechanics.
After having bought a metal mill and a few years later I give it another try. This time I am using electrical servos. The goal is to build a 6-leged robot capable to climb the stairs in our house.
From my understanding I need at least 3DOF legs and a tilt mechanism for the legs to stay perpendicular to the ground while walking up or down. I also want to implement touch down sensors for rough terrain, and identifying the steps of the stairs.
The plan is:
- start with a 3DOF leg to test servo communication, touch down handling and inverse kinematic.
- build a segment with two legs and the tilt mechanics.
- build the platform with the six legs and the basic movement features.
- think about orientation and path planning.
Components
Servos: I am using Dynamixel servos. At the moment I am testing AX-12A and MX-28 servos. At least the Fremur joint is a MX-28 because of the required torque.
Controller: For the tests I use an Arduino Mega 2560. I am planning that each segment gets a custom made board with an AVR ATmega2560 of it’s own. There will be an additional controller for the overall gait coordination.
Touch-Down Sensor: A single force sensor connected to the leg tip. It will be mounted inside the tibia tube.
Software: Handwoven C code.
Leg Geometry
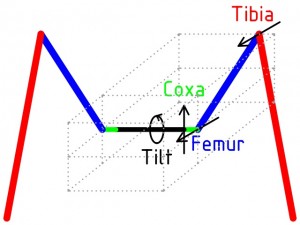
The DOF of a leg: Coxa, Femur, Tibia and the leg tilt
The Walker will have six legs. Each leg has 3 degrees of freedom (DOF) made by 3 joints: coxa, femur and tibia. The naming resembles the joints of mammal legs but are not exactly the same. There is an additional DOF for each pair of legs: the tilt of the leg assembly.
To climb stairs the clearance between body and floor has to be at least 230 mm. This takes into account a 45° grade and tilted feet perpendicular to the floor. That results in a length of 107.3 mm for the Femur and 199.7 mm for the tibia. The coxa should be as short as possible, it’s length depends on the geometry of the servos.
Posts
- Communication
- Double vs Integer
- How to Spend Rainy Holidays
- It Moves!
- Stripping Arduino from the Arduino
- Walker Test Leg
- Milling Joints