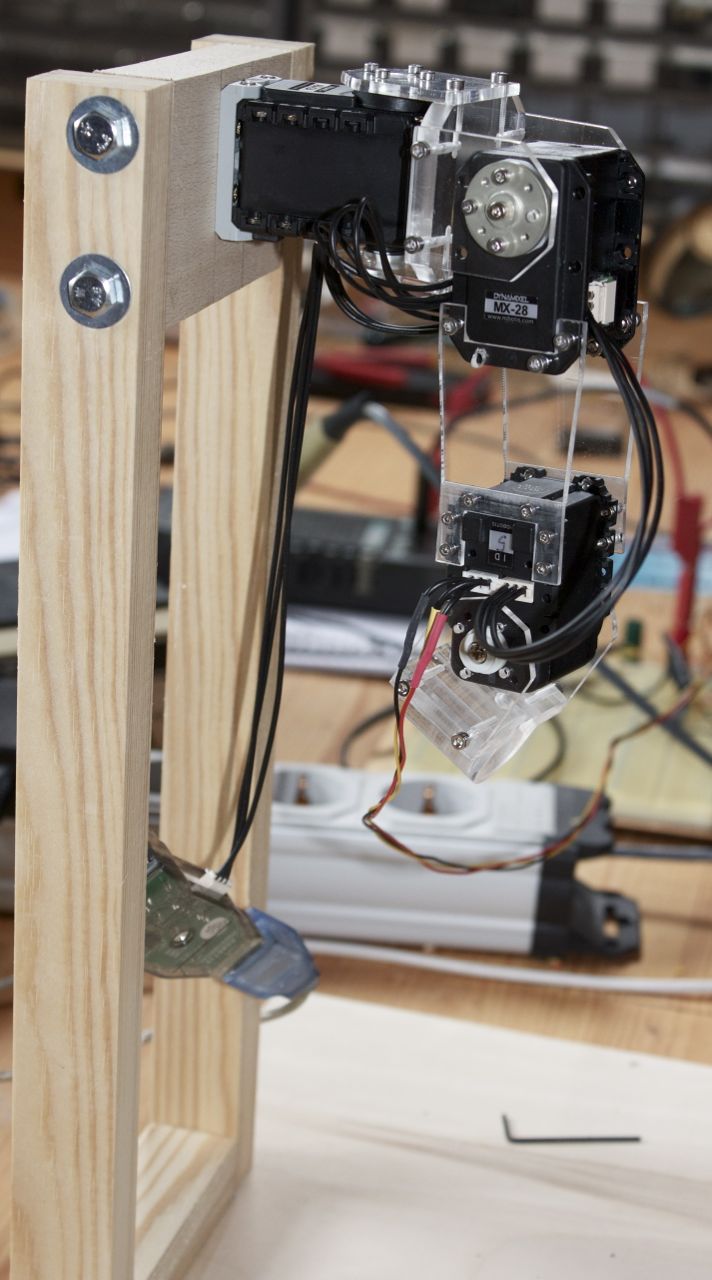
 The first version of the walker test leg has been assembled. Servos are in place. The Tibia and the touch down sensor will be added later.
The first version of the walker test leg has been assembled. Servos are in place. The Tibia and the touch down sensor will be added later.
Now it’s time to start coding the control software.

The first version of the walker test leg has been assembled. Servos are in place. The Tibia and the touch down sensor will be added later.
Now it’s time to start coding the control software.
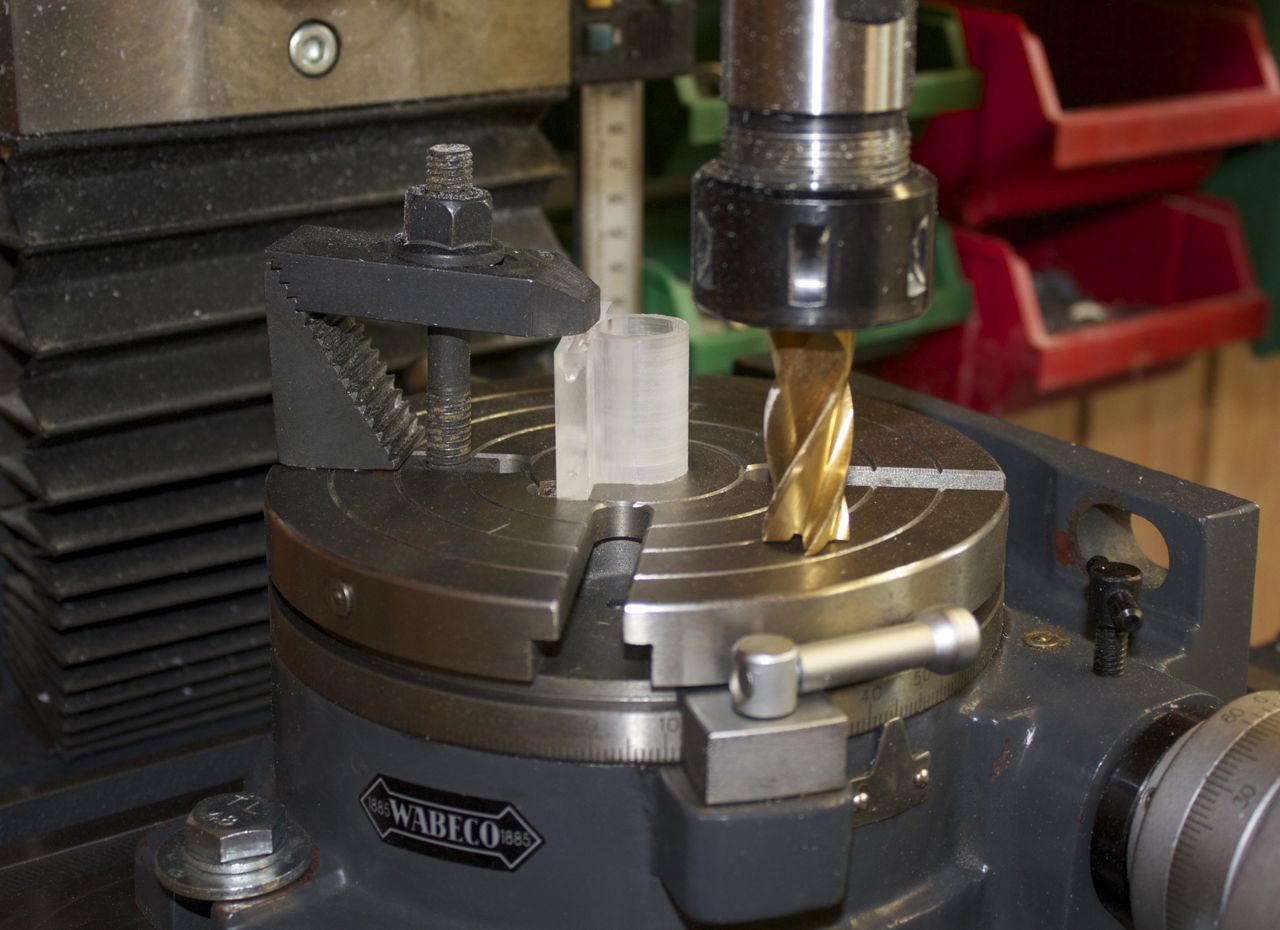 Today I did some milling work of the joints of the first test leg. They are made of acrylic glass. It’s easy to handle after you got the trick. The joint between Femur and Tibia is milled from a massive block.
Today I did some milling work of the joints of the first test leg. They are made of acrylic glass. It’s easy to handle after you got the trick. The joint between Femur and Tibia is milled from a massive block.
