I took a few days off, to get a a little bit of something different before the up-comming stressful weeks.
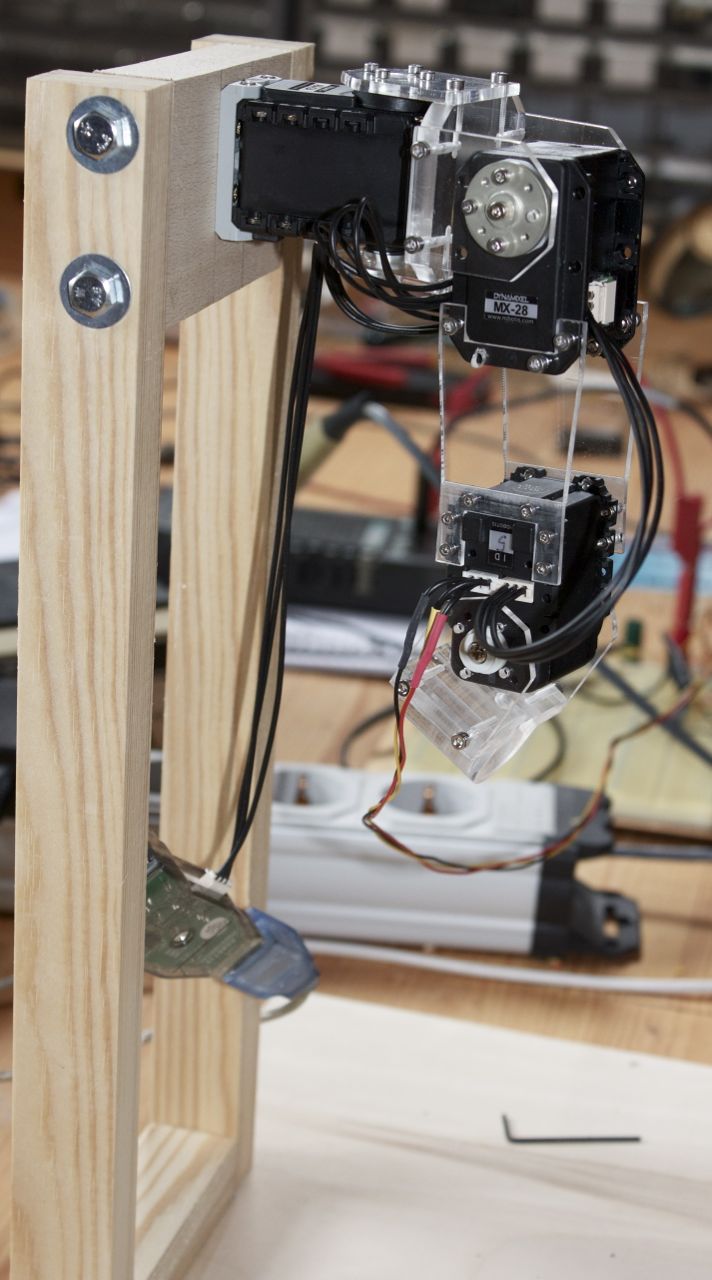
After a nice party with old friends I had to face the fact that the week would not be as nice and sunny as I had hoped. What else to to than to work a little bit on my Walker robot.
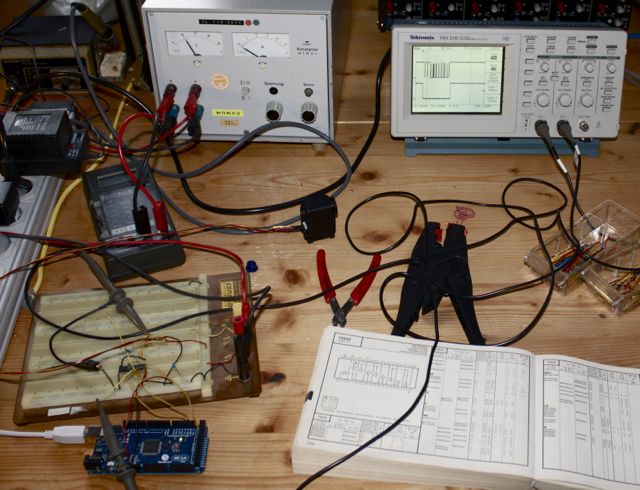
The software can now reliably control the servos, next I am going to get motion and inverse kinematic in place. I have started to implement a linear motion in integer arithmetic. Tricky.
 And I spent some time drawing the force sensor for the feet. I have stripped the design down to one force sensor just measuring the force in the direction of the Tibia. The sensor changes resistance from 10MΩ down to 1kΩ. I have to check the range I am interested in, but these values should be easy to interface with the Arduino.
And I spent some time drawing the force sensor for the feet. I have stripped the design down to one force sensor just measuring the force in the direction of the Tibia. The sensor changes resistance from 10MΩ down to 1kΩ. I have to check the range I am interested in, but these values should be easy to interface with the Arduino.
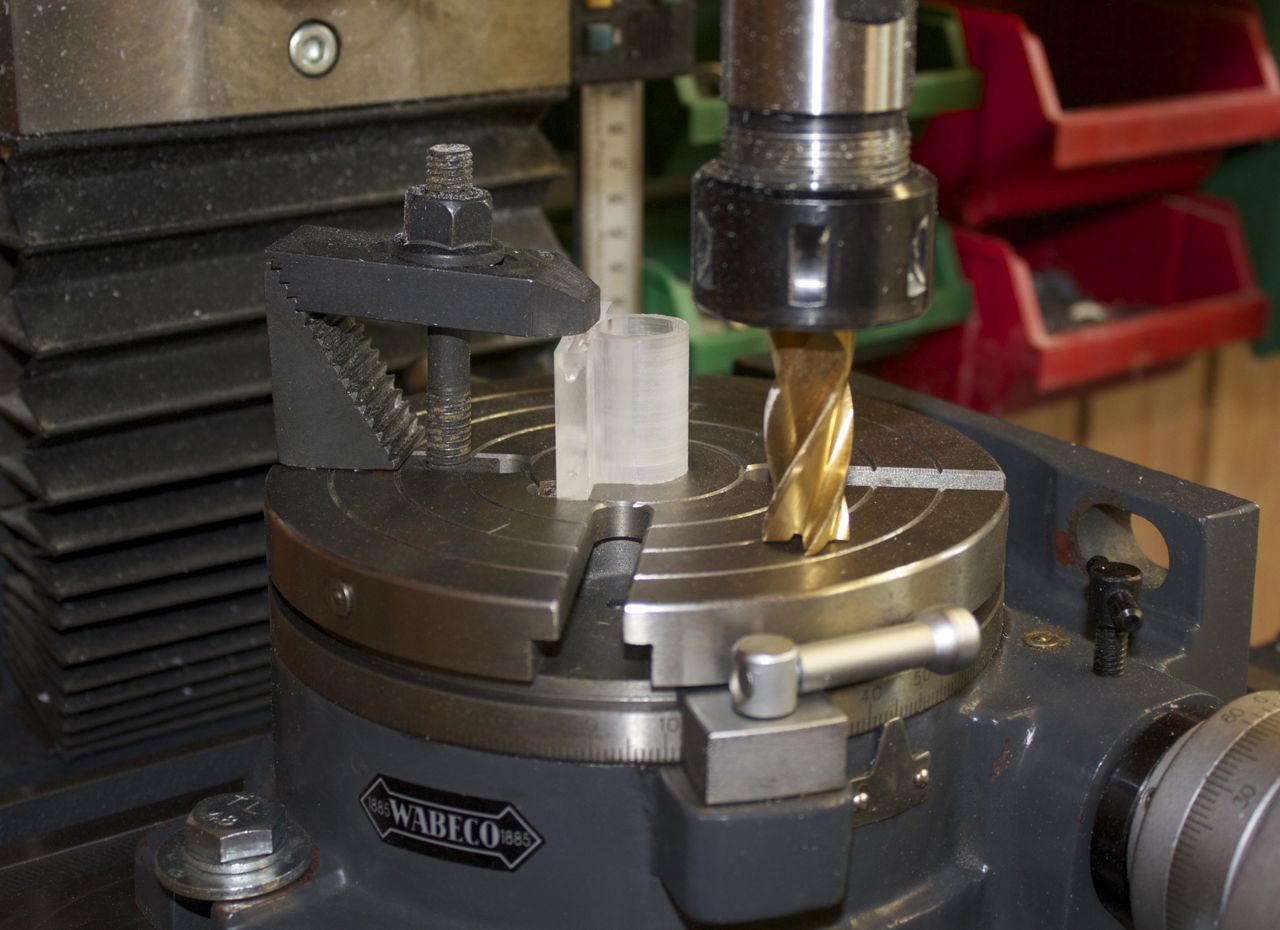
The components are again made of acrylic glass. They are milled out of raw blocks. They fit into the tibia leg tube with an diameter of 15mm. The piston with the axle pushes onto the sensor mounted into the holding block. I am planning to use bouncy balls as feet. Let’s look if this works.